激光雷达扫描点云案例
发布日期:2020-09-11 11:32:40 浏览次数:

无人机激光点云地形测量在京杭运河的数据采集施工过程及成果如下:
施工过程:
航线规划:
- 根据京杭运河的实际地形情况,将测区划分为若干个航摄分区进行数据采集。航摄参数设置包括影像航向重叠度和旁向重叠度,确保数据的完整性和重叠覆盖。
设备准备:
- 使用固定翼垂直起降航测无人机,搭载高清智能摄像机和激光雷达,集成高精度MEMS惯性传感器、高性能CPU、GNSS定位系统等,以确保数据的高精度和飞行的安全性。
数据采集:
- 无人机在120米的高度进行仿地飞行,采集京杭运河沿岸的地表点云数据。无人机的续航时间可达3小时,数据链路覆盖50千米,适合长距离采集作业。
点云预处理:
- 对采集的点云数据进行滤波降噪与抽稀,以获取高质量的点云数据。这一步骤通过算法解算,过滤空洞点云及异常点云,并在满足测量成果要求的前提下对点云进行抽稀。
点云分类与DEM提取:
- 将预处理后的点云数据进行分类,提取数字高程模型(DEM),并进行优化输出。这一步骤确保植被、建筑物及原地面点云完全分开,为后续的分析和应用提供准确的高程信息。
成果:
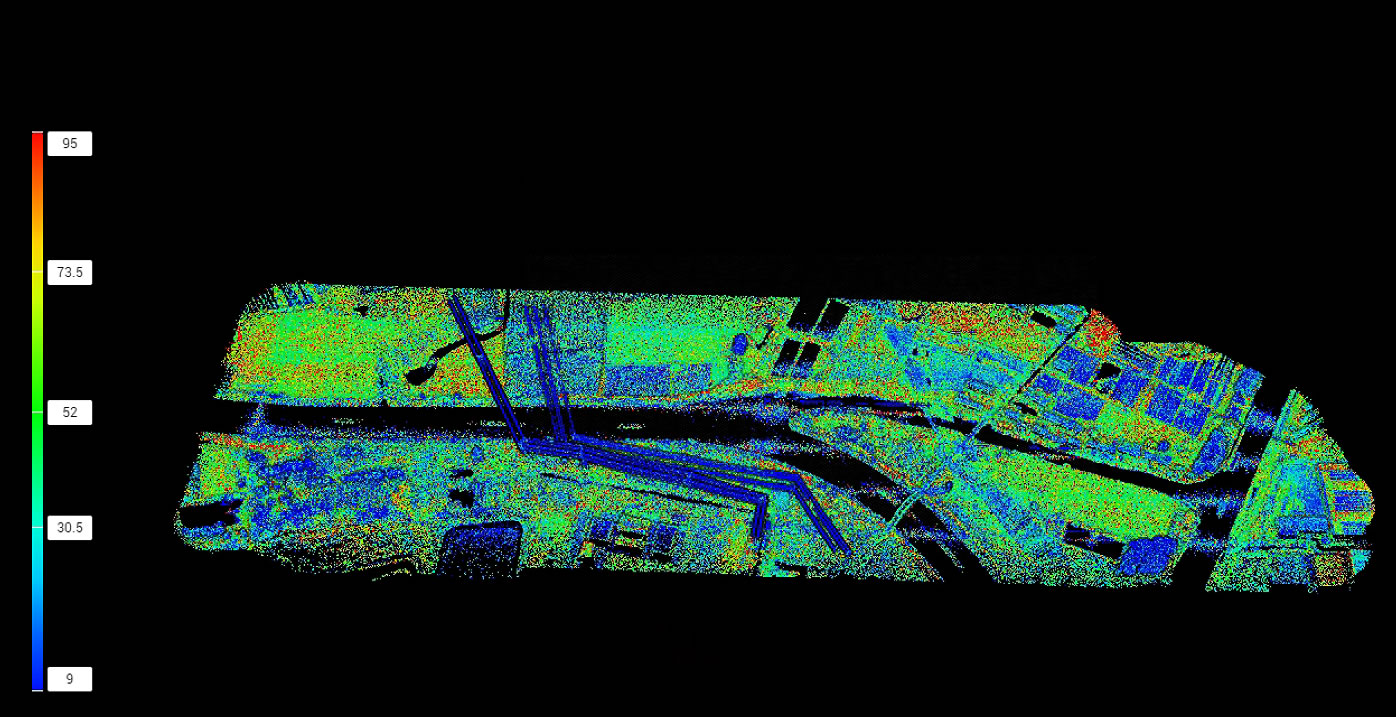
高精度点云数据:
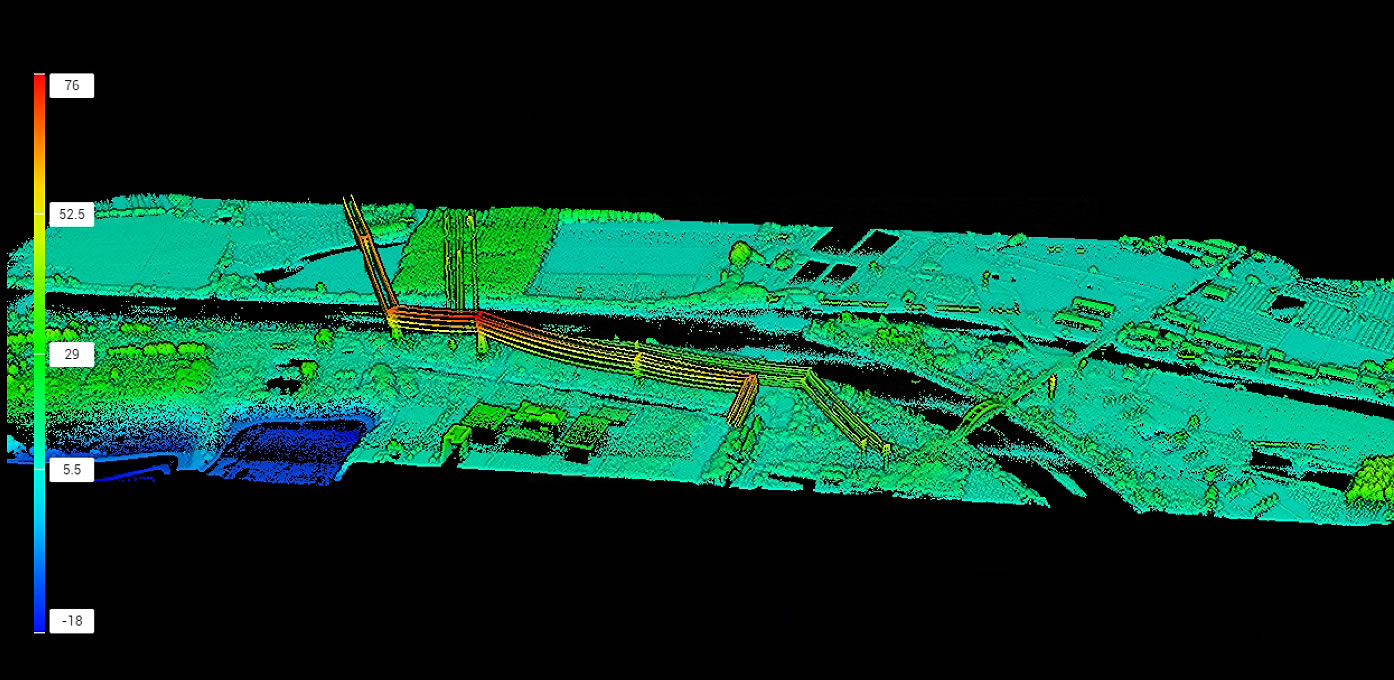
- 通过无人机激光点云测量,获取了京杭运河沿岸的高精度点云数据,这些数据可以清晰地展示地形地貌和沿岸地物的三维空间信息。
数字高程模型(DEM):
- 从点云数据中提取的DEM,可以用于分析地形起伏、计算坡度和坡向等,为京杭运河的航道治理、水文分析等提供基础数据。
正射影像图(DOM):
- 结合无人机拍摄的正射影像和点云数据,可以生成京杭运河的DOM,为运河管理提供直观的二维地图支持。
电子航道图:
- 利用无人机遥感技术和激光点云数据,为京杭运河苏北段提供了电子航道图建设项目所需的高精度影像数据资料,推动智慧运河建设。
土方工程量计算:
- 通过点云数据和DEM,可以计算京杭运河沿岸土方填挖方量,为运河沿岸的土建工程提供精确的工程量估算。
通过上述过程,无人机激光点云地形测量为京杭运河的管理和维护提供了科学、精确的数据支持,提高了工作效率,降低了作业风险,并确保了测量的高精度。





