无人机激光雷达地形测量
发布日期:2024-12-24 18:17:21 浏览次数:
1. 测量前的准备工作
- 确定测量范围:根据项目需求,明确需要测量的地形区域范围,包括测量的边界、重点区域等。
- 设备校准与检查:对激光扫描仪进行校准,确保其测量精度符合要求;检查设备的电池、存储卡等配件是否正常,以保证测量过程的顺利进行。
- 制定测量方案:根据地形特点和测量要求,制定合理的测量方案,包括选择合适的扫描方式(如地面移动扫描或无人机航拍扫描)、确定扫描分辨率、规划扫描路线等。
2. 现场数据采集
- 设备架设与调试:将激光扫描仪架设在合适的位置,调整设备参数,如激光发射频率、扫描角度等,使其能够覆盖整个测量区域。
- 开始扫描:启动激光扫描仪,设备会发射激光脉冲,激光脉冲遇到地形表面后反射回来,扫描仪记录下激光的飞行时间或相位差,从而计算出地形表面各点到扫描仪的距离。
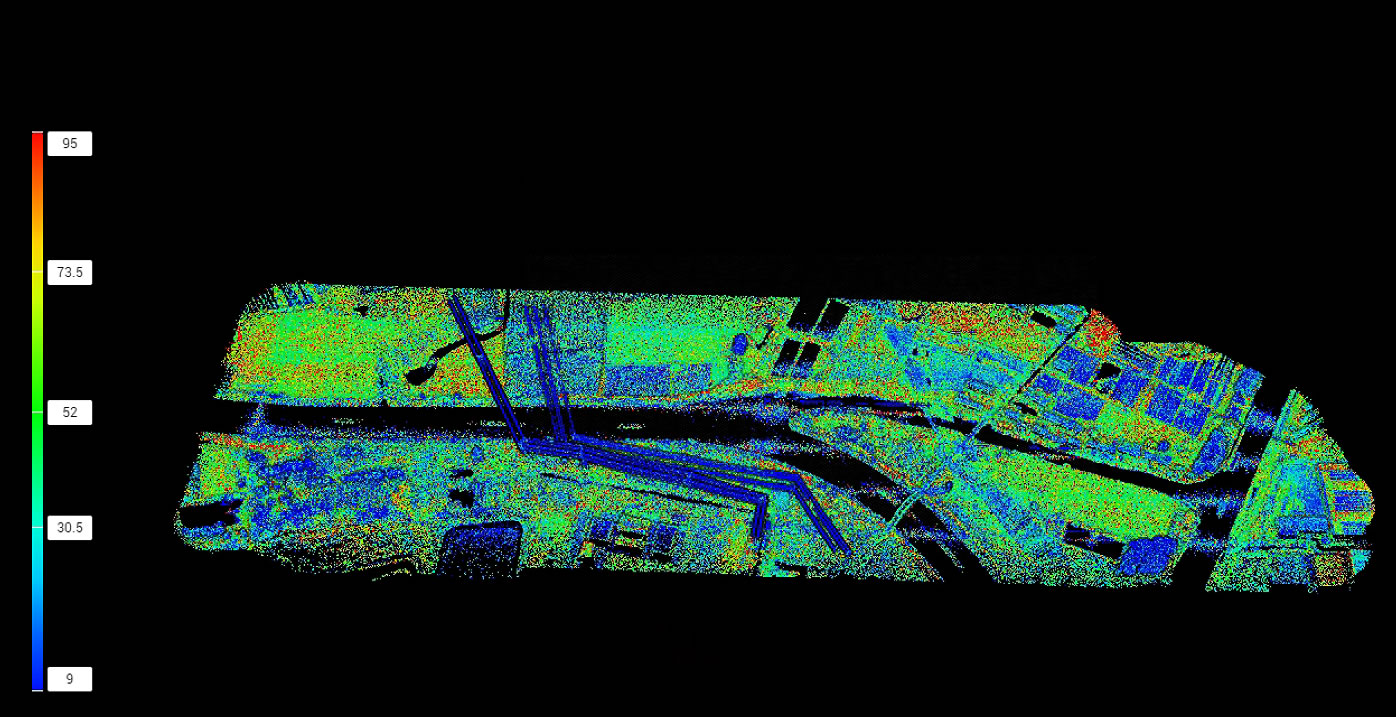
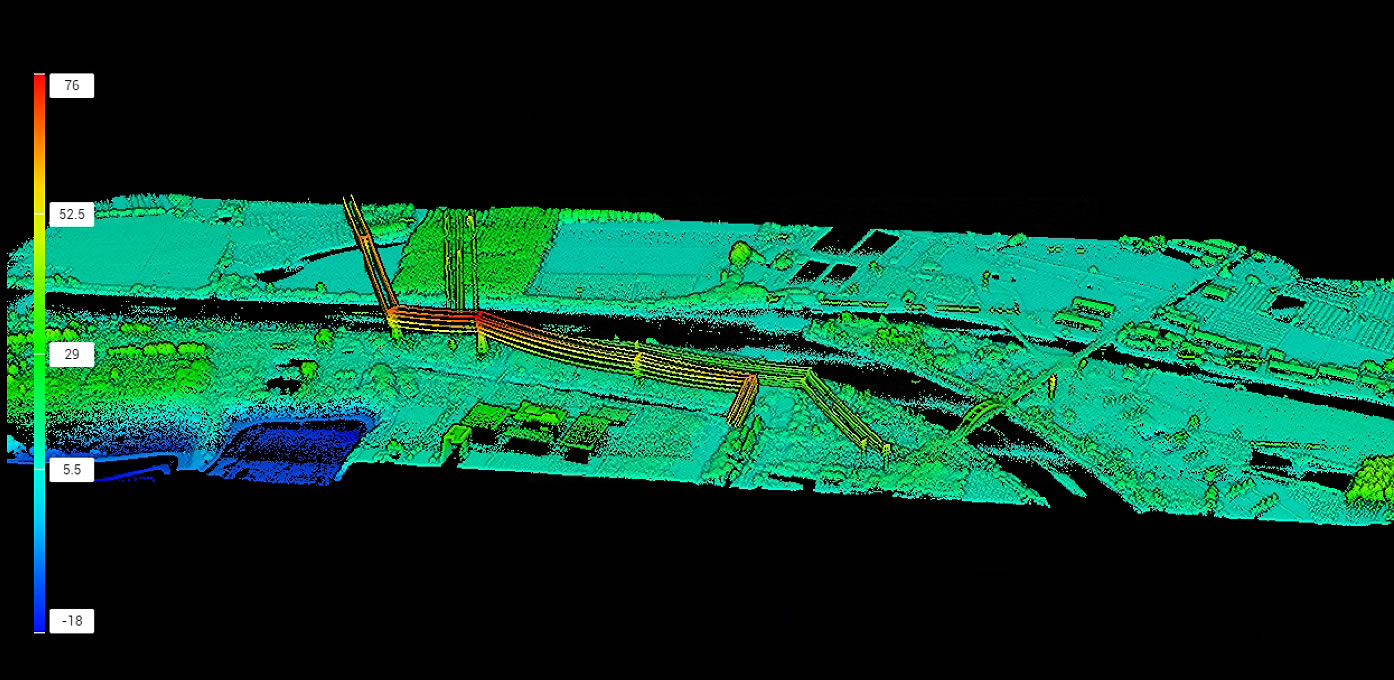
- 数据记录:随着扫描仪的移动或转动,激光脉冲不断发射和接收,扫描仪会实时记录下大量地形表面点的三维坐标数据,形成点云数据。
3. 数据处理与分析
- 数据预处理:对采集到的点云数据进行去噪、滤波等预处理,去除异常点和噪声,提高数据质量。例如,可以使用统计滤波方法去除离群点,或通过滤波算法平滑地形表面。
- 点云配准与融合:如果使用多台扫描仪或多次扫描获取数据,需要对不同数据集进行配准,将它们合并到同一个坐标系下,形成完整的地形点云数据。
- 地形特征提取:从点云数据中提取地形特征,如等高线、坡度、坡向等。可以使用软件工具自动提取等高线,或计算每个点的坡度和坡向信息。
- 地形分析与建模:对提取的地形特征进行分析,了解地形的起伏变化、坡度分布等信息;基于点云数据构建地形的三维模型,可以使用三角网格化方法生成数字地形模型(DTM)。
4. 结果输出与应用
- 生成地形图:根据处理后的点云数据和地形特征,生成各种地形图,如数字高程模型(DEM)、等高线图、坡度图等,为后续应用提供直观的地形信息。
- 应用与决策支持:将测量结果应用于实际项目中,如城市规划中的地形分析、工程建设中的场地平整设计、地质勘探中的地形地貌研究等,为决策提供科学依据。