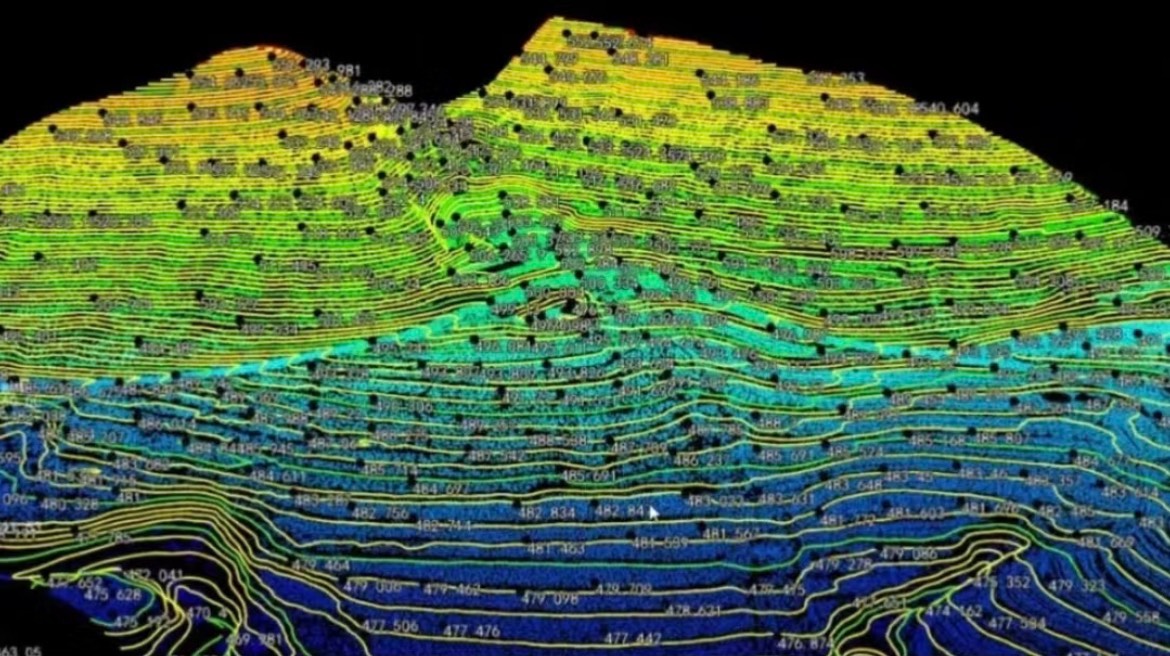
激光点云等高线提取
发布日期:2024-12-24 17:58:42 浏览次数:
数据预处理
- 去噪:去除点云数据中的噪声点,使数据更加干净和准确。常用的去噪方法包括统计滤波、高斯滤波等。
- 滤波:通过滤波算法对点云数据进行平滑处理,以消除数据中的不规则波动。常用的滤波方法包括平均滤波、中值滤波等。
- 配准:将多个点云数据集合并成一个整体,使得点云数据可以在同一个坐标系下进行比较和分析。
数据解算
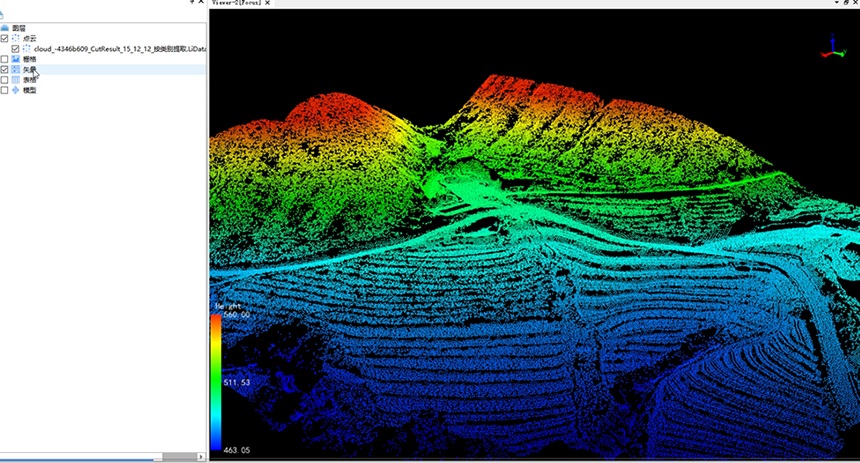
- 创建工程:在点云处理软件中新建工程,并导入扫描得到的点云数据文件。
- 坐标系配置:如果需要,配置点云数据的坐标系,将点云数据转换到所需的坐标系中。
- 点云优化:对点云数据进行优化处理,如点云下采样、上采样等,以减少数据量或提高数据精度。
- 点云赋色:如果扫描仪配备了相机,可以将相机拍摄的图像与点云数据融合,给点云赋予颜色信息。
特征提取与分析
- 特征提取:从点云数据中提取有用的信息,如法线、曲率等几何特征,以及建筑物、道路等目标对象的特征。
- 点云分类:根据提取的特征对点云数据进行分类,如将点云分为地面点和非地面点。
- 点云语义分割:利用深度学习等技术对点云数据进行语义分割,识别出不同的物体和场景。
三维建模与应用
- 模型重建:将优化后的点云数据转换为精确的三维模型,可以使用软件提供的自动或手动建模工具。
- 导出与应用:将处理好的三维模型导出为适合进一步应用的格式,如STL或OBJ,用于三维打印、CAD建模或其他用途。